About Me
Postdoctoral Research Associate
I am a Postdoctoral Research Associate at the IDS Lab, Cornell University, the United States, working with Prof. Andreas A. Malikopoulos. Prior to this position, I held a Postdoctoral Researcher position at KTH Royal Institute of Technology, Sweden, working with Prof. Jonas Mårtensson and Prof. Karl Henrik Johansson.
I am on the academic job market for 2025! Please feel free to get in touch!
- Name: Ting Bai
- Title: Postdoctoral Research Associate
- E-mail: tingbai@cornell.edu
- Institution: Cornell University, Ithaca, NY
- Google Scholar: Click here
- ResearchGate: Click here
- LinkedIn: Click here
- ORCID: Click here
Research Interests
My research interests include cyber-physical systems (CPS), networked control systems (NCS), optimal control, model predictive control (MPC), dynamic programming (DP), reinforcement learning (RL), and their applications to large-scale transportation systems.
Please refer to the Research Section for more details of my research.
I am open to research discussion and collaboration. Please feel free to reach out!
News
- 10-12/12/2025: I presented at the 64th IEEE Conference on Decision and Control (CDC),Rio de Janeiro, Brazil
- 22/04/2025: I am honored to be selected as an IEEE ITS Ambassador and as a recipient of the IEEE ITSS fellowship
- 14/12/2024: I gave an invited talk on coordinated charging of EVs at Dalian University of Technology
- 10/11/2024: I started my new postdoctoral researcher position at Cornell University
- 25-28/06/2024: I presented at the 22nd European Control Conference (ECC), Stockholm, Sweden
- 01/02/2024: I was honored to be an ACM Professional Member granted by the Association for Computing Machinery (ACM)
- 13-15/12/2023: I presented at the 62nd IEEE Conference on Decision and Control (CDC), Marina Bay Sands, Singapore
- 12/12/2023: I was invited to present at the 2023 CDC Workshop, Marina Bay Sands, Singapore
- 18-19/10/2023: I attended Digitalize in Stockholm, 2023 Annual Conference, Stockholm, Sweden
- 20-22/09/2023: I attended the ELLIIT Focus Period Symposium on Network Dynamics and Control, Linköping, Sweden
- 06-09/12/2022: I presented at the 61st IEEE Conference on Decision and Control (CDC), Cancún, Mexico
- 10-17/07/2022: I attended the EECI Learning-Based Predictive Control, at ETH, Zurich, Switzerland
- 07-09/06/2022: I presented at the Reglermöte 2022, at Luleå University of Technology, Stockholm, Sweden
- 04-07/05/2022: I presented at the 13th Asian Control Conference (ASCC), Jeju Island, Korea
- 13-17/12/2021: I presented at the 60th IEEE Conference on Decision and Control (CDC), Austin, Texas, USA
- 20-21/10/2021: I attended Digitalize in Stockholm, 2021 Annual Conference, Stockholm, Sweden
- 09-10/11/2020: I attended Digitalize in Stockholm, 2020 Annual Conference, Stockholm, Sweden
- 09/2020: I joined the Division of Decision and Control Systems, KTH, as a postdoctoral researcher
Biography
Education
Ph.D., Control Science and Engineering
Sep 2013 - Dec 2019
Shanghai Jiao Tong University (SJTU), Shanghai, China
Advisor: Prof. Shaoyuan Li
Dissertation: Design and Synthesis of Distributed Reconfigurable Predictive Control Systems
Award: Career Development Scholarship for Outstanding Doctoral Graduates in SJTU (2020-2022)
B.Eng., Automation
Sep 2009 - Jun 2013
Northwestern Polytechnical University (NPU), Xi'an, China
Thesis: Research on the Principle Prototype of Soft PLC based on Embedded Systems
Awards:
- Special Award for New College Students (Top 1%)
- Outstanding Graduate in NPU (2013)
- Excellent Graduation Thesis in NPU (2013)
Work Experience
Postdoctoral Researcher
Nov 2024 - Present
Cornell University, New York, the United States
Advisor: Prof. Andreas A. Malikopoulos
Award: IEEE ITSS Fellowship: Empowering Women & Young Professionals in ITS (2025)
Postdoctoral Researcher
Sep 2020 - Sep 2024
KTH Royal Institute of Technology, Stockholm, Sweden
Advisors: Prof. Jonas Måtersson, and Prof. Karl H. Johansson
Award: Future Digileaders selected by Digital Futures (2020)
Postdoctoral Researcher
Mar 2020 - Sep 2020
Shanghai Jiao Tong University (SJTU), Shanghai, China
Advisors: Prof. Shaoyuan Li, and Prof. Guangtao Xue
Award: Super Postdoctoral Fellow in Shanghai (2020)
Selected Research

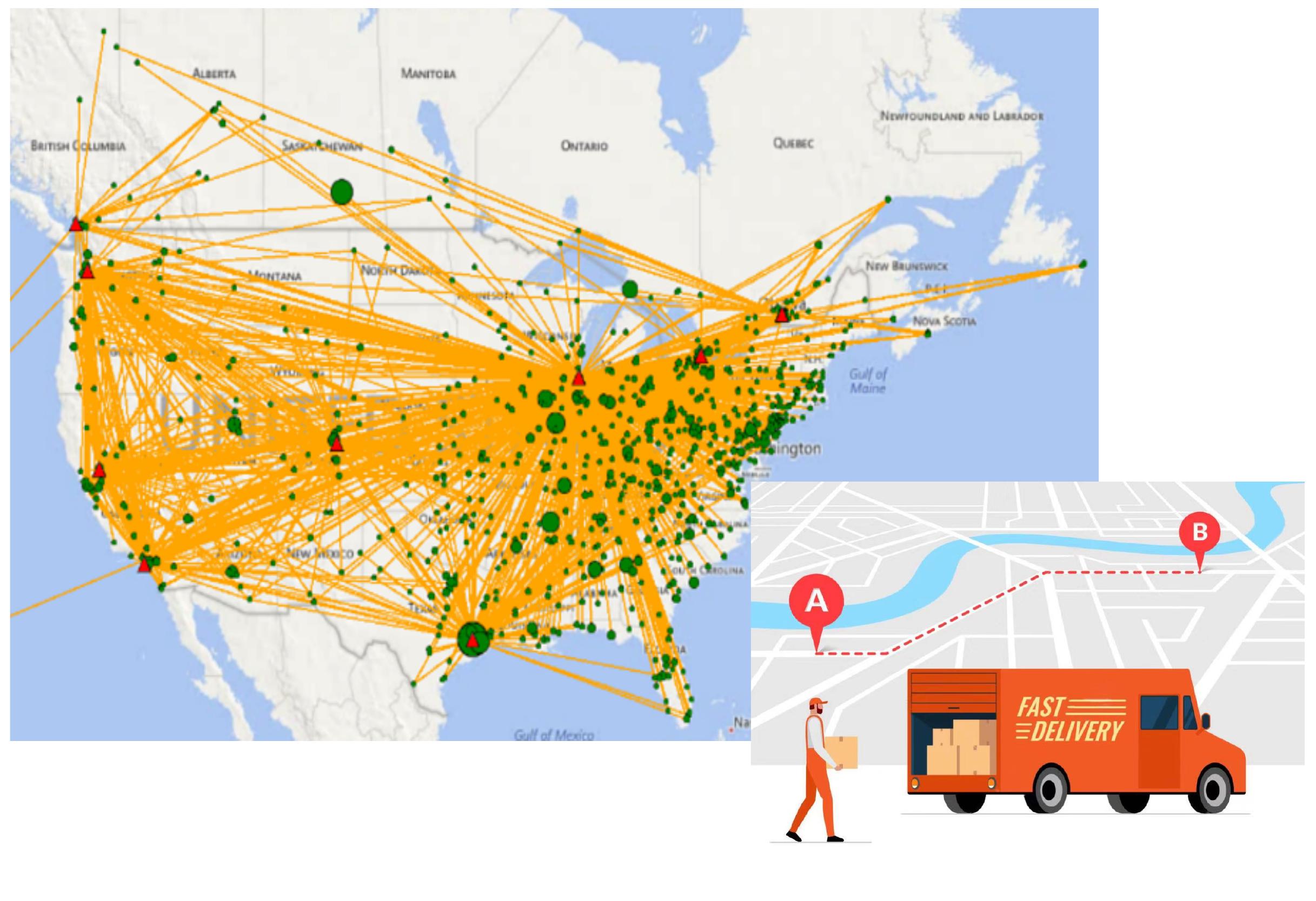
Rollout-Based Charging Strategy for Electric Trucks
Freight drivers of electric trucks need to design charging strategies for where and how long to recharge the truck in order to complete delivery missions on time. Moreover, the charging strategies should be aligned with drivers' driving and rest time regulations, known as hours-of-service (HoS) regulations. We study optimal charging problems of electric trucks with delivery deadlines under HoS constraints. We assume that a collection of charging and rest stations are given along a pre-planned route with known detours and that the problem data are deterministic. The goal is to minimize the total cost associated with the charging and rest decisions during the entire trip. This problem is formulated as a mixed integer program with bilinear constraints, resulting in a high computational load when applying exact solution approaches. To obtain real-time solutions, we develop a rollout-based approximate scheme, which scales linearly with the number of stations while offering solid performance guarantees. We perform simulation studies over the Swedish road network based on realistic truck data. The results show that our rollout-based approach provides near-optimal solutions to the problem in various conditions while cutting the computational time drastically.
Related Publications:

DP-Based Multi-Fleet Platoon Coordination Approach
The real-world transportation system includes a vast number of trucks owned by different fleet owners, for example, carriers. To fully exploit the benefits of platooning, efficient dispatching strategies that facilitate the platoon formations across fleets are required. We present a distributed framework for addressing multi-fleet platoon coordination in large transportation networks, where each truck has a fixed route and aims to maximize its own fleet's platooning profit by scheduling its waiting times at hubs. The waiting time scheduling problem of individual trucks is formulated as a distributed optimal control problem with continuous decision space and a reward function that takes non-zero values only at discrete points. By suitably discretizing the decision and state spaces, we show that the problem can be solved exactly by dynamic programming (DP), without loss of optimality. The realistic simulation study performed over the Swedish road network with 5,000 trucks shows that, compared to single-fleet platooning, multi-fleet platooning provided by our method achieves around 15 times higher monetary profit and increases the CO2 emission reductions from 0.4% to 5.5%. In addition, it shows that the developed approach can be carried out in real time and thus is suitable for platoon coordination in large transportation systems.
Related Publications:
Platoon Coordination for Large Transport Systems
We consider the problem of hub-based platoon coordination for a large-scale transport system, where trucks have individual utility functions to optimize. An event-triggered distributed model predictive control method is proposed to solve the optimal scheduling of waiting times at hubs for individual trucks. Under this distributed framework, trucks are allowed to decide their waiting times independently and only limited information is shared between trucks. Both the predicted reward gained from platooning and the predicted cost for waiting at hubs are included in each truck's utility function. The performance of the coordination method is demonstrated in a simulation with one hundred trucks over the Swedish road network.
Related Publications:
Publications
Preprints
Selected Journal Papers
Conference Papers
Professional Services
Journal Editorial Board
- Associate Editor: IEEE Transactions on Intelligent Transportation Systems (2025-)
Program Committee
- Diversity and Inclusion Co-chair of the 29th IEEE ITSC, Naples, Italy, September 15-18, 2026
- Associate Editor of IEEE Forum for Innovative Sustainable Transportation Systems, Cairo, Egypt, February 4-6, 2026
- Co-chair of the Session "Emerging Mobility in Intelligent Transportation Systems III", 64th IEEE CDC, 2025
- Co-organizer of Sessions "Emerging Mobility in Intelligent Transportation Systems I,II,III", 64th IEEE CDC, 2025
- Associate Editor of the 28th IEEE ITSC, Gold Coast, Australia, November 18-21, 2025
- TPC of the 9th ICITT, Amsterdam, The Kingdom of the Netherlands, September 15-17, 2025
- Publication Co-chair of the 27th IEEE ITSC, Edmonton, Canada, September 24-27, 2024
- Associate Editor and Award Committee of the 27th IEEE ITSC, Edmonton, Canada, September 24-27, 2024
- Technical Program Committee (TPC) of the 8th ICITT, Certificate, Florence, Italy, September 16-18, 2024
- Chair of the Session "Intelligent Systems", 62nd IEEE CDC, Singapore, December 13-15, 2023
- Co-chair of the Session "Machine Learning V", 62nd IEEE CDC, Singapore, December 13-15, 2023
- Co-organizer of the 2nd Stockholm Workshop on Emerging Topics in Systems and Control, March 30, 2023
- Co-organizer of the 2022 NetCon Workshop, Skansen, Stockholm, June 30, 2022
- Co-organizer of the 2021 NetCon Workshop (virtual), March 10-11, 2021
- Host of the Transport Seminar at the Division of DCS, KTH, 2020-2023
Journal Reviewer
- Automatica
- IEEE Transactions on Automatic Control
- IEEE Transactions on Intelligent Transportation Systems
- IEEE Transactions on Transportation Electrification
- IEEE Transactions on Circuits and Systems for Video Technology
- IEEE Transactions on Intelligent Vehicles
- IEEE Transactions on Vehicular Technology
- IEEE Transactions on Industrial Informatics
- IEEE Transactions on Control Systems Technology
- IEEE Transactions on Control of Network Systems
- IEEE Transactions on Reliability
- IEEE/CAA Journal of Automatica Sinica
- IEEE Internet of Things Journal
- IEEE Control Systems Letters
- ACM Transactions on Cyber-Physical Systems
- Transportation Research Part C: Emerging Technologies
- Expert Systems with Applications
- Control Engineering Practice
- Journal of the Franklin Institute
- Systems & Control Letters
Conference Reviewer
- IEEE Conference on Decision and Control (CDC)
- American Control Conference (ACC)
- European Control Conference (ECC)
- IFAC World Congress (IFAC WC)
- IFAC Symposium on Control of Power & Energy Systems (IFAC CPES)
- IFAC Symposium on Control in Transportation Systems (IFAC CTS)
- IEEE Conference on Intelligent Transportation Systems (ITSC)
- IEEE Intelligent Vehicles Symposium (IV)
- Learning for Dynamics & Control Conference (L4DC)
- Asian Control Conference (ASCC)
- Chinese Control Conference (CCC)
Supervision
- Robin Ganguly and Guanyu Lin, Truck Platoon Coordination in a Large-Scale Transportation System, Bachelor Thesis, KTH.